Hey, I’m Conor
Welcome to my portfolio of my projects and passions

About Me
I’m a student at Queen’s University, specializing in Engineering Physics with a focus on Computing. My academic and professional pursuits are rooted in a passion for robotics, machine learning, and computer vision. As the Perception and Automation Lead for the Queen’s Aerospace Design Team, I’ve had the privilege of applying my knowledge to real-world challenges in aerospace design. This role has allowed me to deepen my expertise in developing advanced perception systems and automation strategies, fueling my interest in the practical applications of these innovative technologies. I’m driven by the thrill of solving complex problems and am excited about the potential to contribute to the future of engineering through these dynamic fields.
Projects
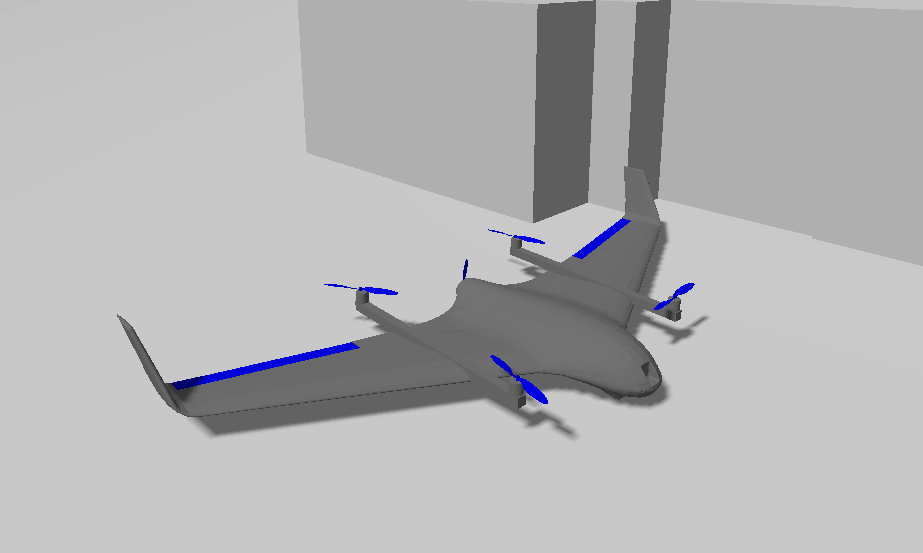
Autonomous VTOL Development
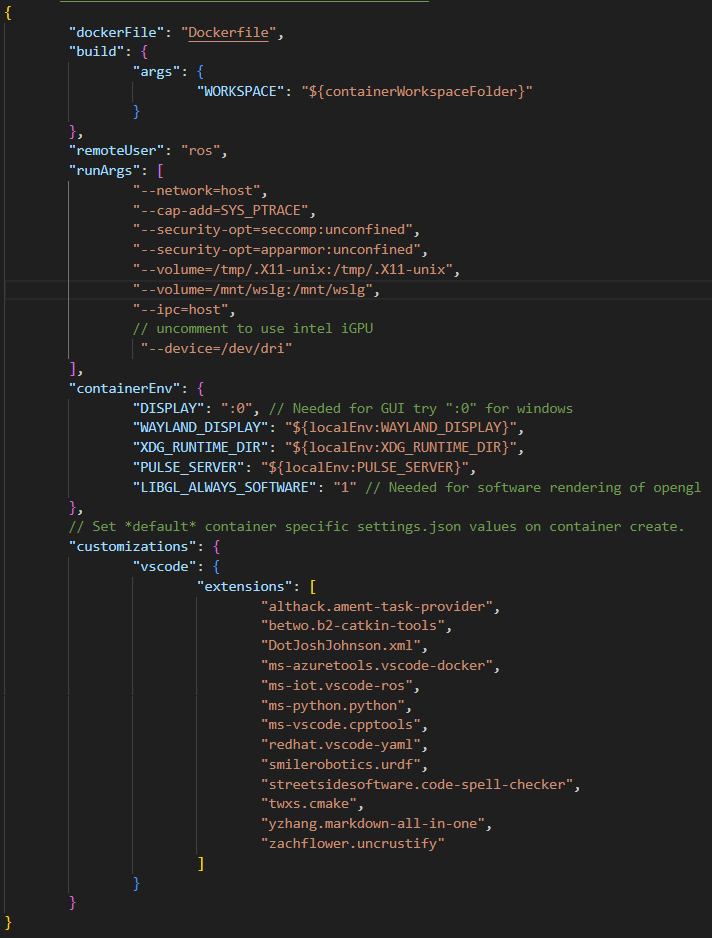
Custom Remote Container
- Docker-Based Remote Container: Led the development of a custom container solution.
- Reduced Setup Times: Achieved an 80% reduction in environment setup time.
- Consistency Across Team: Ensured 100% environment consistency for 20 developers.
- Faster Integration Cycles: Facilitated a 30% acceleration in integration cycles.
- Enhanced Team Efficiency: Significantly improved team collaboration and workflow efficiency.
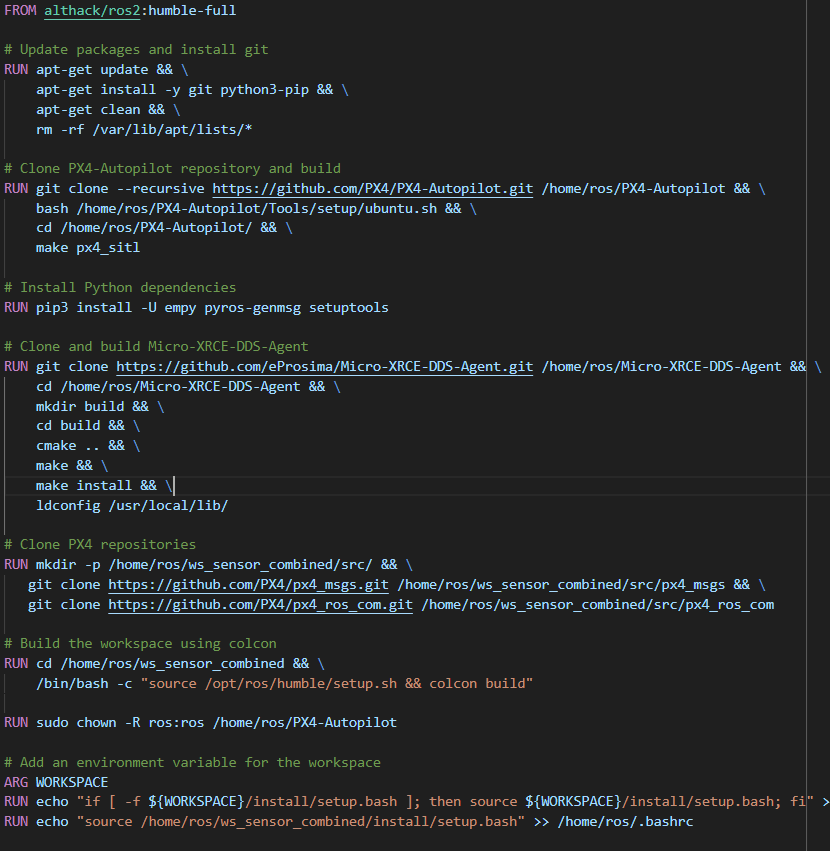
Custom Docker File
- Base Image: Utilizes
althack/ros2:humble-fullas the base ROS 2 image. - Package Updates and Git Installation: Runs apt-get to update packages and install git and python3-pip.
- PX4-Autopilot Repository: Clones and builds the PX4-Autopilot repository.
- Python Dependencies: Installs Python dependencies including empy, pyros-genmsg, and setuptools.
- Micro-XRCE-DDS-Agent: Clones and builds the Micro-XRCE-DDS-Agent from eProsima.
- PX4 Repositories: Clones
px4_msgsandpx4_ros_cominto a new ROS workspace. - Workspace Build: Builds the workspace using colcon and sources the ROS environment.
- Ownership Adjustment: Changes ownership of the PX4-Autopilot directory to the
rosuser. - Environment Variable Setup: Adds an environment variable for the workspace and updates
.bashrcto source workspace setup files.
VTOL Offboard Control
- Node Setup: Initializes a new ROS2 node for controlling an autonomous VTOL.
- Publishers and Subscribers: Establishes communication channels for sending commands to the drone and receiving status updates.
- Data Handling: Implements callback functions to process incoming data on drone position, status, and GPS readings.
- Drone Control Functions: Includes functions to arm the drone, publish control modes, and send trajectory setpoints.
- Mode Switching Logic: Contains logic to switch the drone between different operational modes, such as offboard control.
- Command Execution: Facilitates the execution of various vehicle commands with customizable parameters.
- Periodic Updates: Uses a timer to periodically send control signals and check the drone’s status.
- Main Execution Flow: Manages the initialization, operation, and shutdown of the node within the ROS2 framework.
- Error Handling: Incorporates exception handling for robust and error-free operation.